



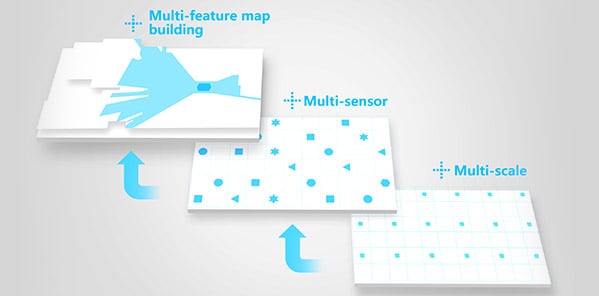
多傳感器融合的激光和視覺SLAM技術,對環境進行全方位建模和特徵識別。通過建立特徵地圖為機器人提供可靠的定位和導航參考,無需對環境進行改造。在密集貨架的無人倉中,利用二維碼系統建立地圖,採用視覺二維碼相機和慣性導航融合實現機器人全場定位和導航。
優勢
• 採用環境特徵建圖,無需對運行場景進行改動
• 可適應製造業、倉庫等人機混行的高動態場景
• 視覺二維碼和慣性導航融合定位和導航的高可靠性

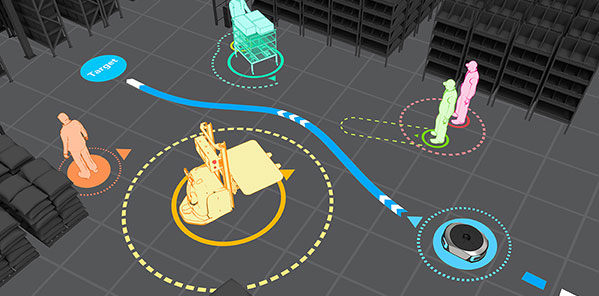
融合RGBD相機、激光雷達及安全傳感器等多傳感器信息,結合深度學習算法實現對目標的精準檢測與環境理解,增強了機器人對複雜環境的適應性、魯棒性和運行安全性。
優勢
• 多傳感器融合,可適應複雜的人機混合場景並具有很好的安全性
• 利用RGB和3D相機,對於小體積和輕薄障礙物進行識別
•深度學習與傳統CV技術相結合,魯棒性高
基於高效控制模型的運動控制參數自適應算法,實現不同類型智能機器人的自主高效移動,柔和與敏捷的啟停,確保機器人高速與穩定的運行。
優勢
• 不同形態機器人的運動參數自適應
• 避免碰撞的運動安全決策
• 平滑的軌跡規劃,多類型控制器精確跟踪目標軌跡柔性的加減速規劃,確保運行平穩度
