


X系列存储机器人是一款在立体货架内沿着轨道进行水平四向移动的存取机器人,可为货品在立体空间的自动化密集存储及出库提供支持。X1200采用窄车身设计,与传统叉车相比可节省巷道空间。



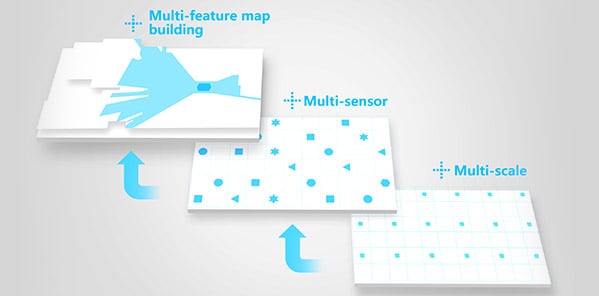
多传感器融合的激光和视觉SLAM技术,对环境进行全方位建模和特征识别。 通过建立特征地图为机器人提供可靠的定位和导航参考,无需对环境进行改造。 在密集货架的无人仓中,利用二维码系统建立地图,采用视觉二维码相机和惯性导航融合实现机器人全场定位和导航。
优势
• 采用环境特征建图,无需对运行场景进行改动
• 可适应制造业、仓库等人机混行的高动态场景
• 视觉二维码和惯性导航融合定位和导航的高可靠性

融合RGBD相机、激光雷达及安全传感器等多传感器信息,结合深度学习算法实现对目标的精准检测与环境理解,增强了机器人对复杂环境的适应性、鲁棒性和运行安全性。
优势
• 多传感器融合,可适应复杂的人机混合场景并具有很好的安全性
• 利用RGB和3D相机,对于小体积和轻薄障碍物进行识别
•深度学习与传统CV技术相结合,鲁棒性高
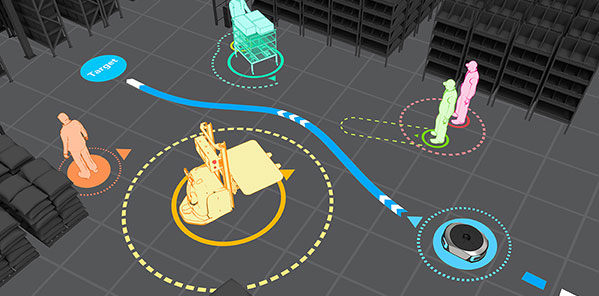
基于高效控制模型的运动控制参数自适应算法,实现不同类型智能机器人的自主高效移动,柔和与敏捷的启停,高速与稳定的运行。
优势
• 不同形态机器人的运动参数自适应
• 避免碰撞的运动安全决策
• 平滑的轨迹规划,多类型控制器精确跟踪目标轨迹柔性的加减速规划,确保运行平稳度
